ARM cross-toolchain from scratch
- Intro
- Prepare the compilation tree and an isolated shell
- Grab the sources
- Understand the build order
- Build the binutils
- Build the bootstrap compiler
- Extract the kernel headers
- Build glibc
- Build the final GCC
- Test the cross-toolchain
A cross toolchain is a set of tools (such as compiler, assembler, linker and related libraries) that run on a kind of system (such as an AMD64 machine) but produce programs that will run on a different architecture (ARM, MIPS, …). Typically, a toolchain installed on one’s system is, conversely, configured to produce programs that run on the same systems as the toolchain itself: this is called a native toolchain.
Cross toolchains are often needed when building software for embedded or heavily constrained systems, usually because of two main reasons:
- the target system does not have the ability to run a native toolchain for its own architecture, as its CPU, memory, storage or OS environment (if any) are too limited;
- the target system can run a native toolchain, but the CPU speed makes compiling even moderately large programs painfully slow. Think about the earliest Raspberry Pi models.
A cross toolchain allows using a separate system with plenty of memory, CPU cores, storage and a powerful OS to run the build. The outputs will then be copied to the target using a programmer, an SD card or whatever the target boots from, and run.
A typical scenario involves using an x86-64 system to build software for some low-power ARM system. And often, this software will consist of a Linux-based system especially crafted for the task at hand. Many steps are required to build such complete, albeit small, system. We need:
- a bootloader to take off after the hardware has initialized itself, to load the kernel, device tree blobs and initial ramdisks into memory;
- a Linux kernel supporting the target architecture and the devices present on the board;
- a set of basic libraries, such as standard C and C++ libraries;
- standard tools that make up the skeleton of the system: an init
system, a shell, utilities like
cp,ls, …; - essential files used by libraries and tools and runtime, such as
/etc/fstab,/etc/passwd,/etc/inittab.
However, the first step to be able to build any of the above for an embedded system is to grab a cross-toolchain that targets it.
While there are many resources about building cross-compiled kernels, bootloaders and basic utilities, there is not much information about building a cross-toolchain. The usual recommendations given by books and tutorials boils down to:
- grab a precompiled cross-toolchain from one of major providers on the net: both ARM and Bootlin release high-quality cross toolchains that run on x86-64 hosts and produce code for ARM processors;
- use specialized tools like buildroot or crosstool-ng, which automate the creation of the toolchain, starting from a user-defined configuration that can even be edited graphically.
Now, there is no doubt that, for anything serious and unless very special needs arise, using a tried and tested product like the ones above is by far the best option. They are made by people who know and are both optimized and free of trivial but subtle errors one could make while building itself. But…
But using an automated tool takes away the experience (and thus the knowledge) about building one of the fundamental blocks of your embedded project. I don’t like the idea of blindly using a tool without some understanding of how it works, so for me building my own cross toolchain is a must, even if the next step is to throw it away and use a precompiled one.
Unfortunately, finding accurate information on this topic seems a little difficult. Your best bet seems to be the Cross Linux From Scratch book. It shows the steps required to build a cross toolchain, but it has a number of limitations:
- the latest stable version dates back to 2014;
- it is written for many architectures, but there is no ARM;
- the explanations about why you need certain options are, at least in my eyes, a little terse.
So I decided to try and make my own, mixing instructions and tips from various sources with my own experimentation. Touching problems with your own hands and finding a solution is invaluable. This document explains the process I followed and, more importantly, the rationale of each option or choice.
A warning is due here. While the output toolchain seems to work (it successfully compiled a bootable Linux system for a Raspberry Pi made by U-Boot, the Linux kernel, Busybox and an Hello World C++ sample running on top of that), the whole process is about learning. This means that there are no guarantees that the toolchain does not contain some subtle bugs that may break specific packages. Also, it is likely not as well optimized as it could and output code could be suboptimal. You should definitely not use it for anything serious.
That being said, let’s roll up our sleeves and start building.
Intro
We will build a cross-toolchain targeting 32-bit ARM processors, but hosted on a AMD64 system. The latest available versions of GCC, glibc and the GNU binutils are used. The host system is Arch Linux and we’ll use some of its libraries when building GCC (such as MPFR and GMP). The final toolchain will be relocatable, meaning you can move it whereever you like and it will still find include and library folders correctly.
Prepare the compilation tree and an isolated shell
The very first thing to do is ensuring that the host system has essential development packages installed:
sudo pacman -S --noconfirm --needed base-devel
Both LFS and CLFS create a new unprivileged user that is employed to build packages, guaranteeing the maximum isolation between the built packages and the host system. Using our current user may raise issues, because most build operations react to environment variables. If by chance some variables in our environment clash with parameters build systems expect, we may inadvertently alter the build.
However, creating a new user for that looks a bit overkill to me. A
simpler approach involves env and appropriate shell options to run a
new shell in a clean environment.
Sources and compiled artifacts are kept under a single directory tree.
You can place it everywhere you like, although it should be on a POSIX
filesystem with at least 10GiB of free space. I used
~/projects/embedded. This directory will be referenced as $CROSSDIR.
Inside this folder, create a new file activate.bash, make it
executable, and paster the following code inside:
#!/usr/bin/env bash
CROSSDIR="$PWD"
TOOLS="$CROSSDIR/mytoolchain/tools"
SYSROOT="$TOOLS/sysroot"
TARGET_TRIPLET=arm-none-linux-gnueabihf
HOST_TRIPLET="$(gcc -dumpmachine)"
exec env -i \
`: Copy some vars from the current environment` \
USER="$USER" LOGNAME="$LOGNAME" TERM="$TERM" HOME="$HOME" \
`: Some other vars are set to specific values` \
CROSSDIR="$CROSSDIR" TOOLS="$TOOLS" SYSROOT="$SYSROOT" \
HOST_TRIPLET="$HOST_TRIPLET" TARGET_TRIPLET="$TARGET_TRIPLET" \
ARCH='arm' CROSS_COMPILE="$TARGET_TRIPLET-" \
PATH="$TOOLS/bin:/usr/local/bin:/usr/bin" PS1='[\u@(cross)\h \W]\$ ' \
`: Launch a new instance of bash` \
bash --norc +h
What this file does is launching a new instance of bash while purging
the current environment of unwanted items:
-
envis a tool that modifies the environment before launching a process, effectively causing the new process to see an altered environment w.r.t. the parent; -
-icausesenvthe create an initially empty environment for the new process; - variable definitions in the form
VAR=VALUE, likeHOME="$HOME", simply add some variables into the new process environment. A completely empty environment is not functional: most applications expect a minimal set of standard variables to be available, such asHOMEandUSER. They are either copied them from the current environment (so that the new shell sees the same values as the current shell) or set to specific values. Some of this variables, likeARCHorTARGET_TRIPLET, will be used and explained later; -
bash --norc +hlaunches a new instance ofbash, which is asked to avoid executing its usual startup files/etc/bash.bashrcand~/.bashrcby means of--norc. Without this option, even if the environment is clear, stuff could still be added by code contained in those files.+hdisables command hashing as recommended by LFS environment setup.
Start a new, pristine shell by running:
./activate.bash
A call to printenv will confirm that the environment is almost empty.
There are a few thing to note here:
- the
PS1prompt contains the(cross)marker as a reminder that this is not our usual environment; - there is no
DISPLAY, so X apps will not work; use a regular terminal for that; - there is no
/binin thePATH, as we assume that our host system (Arch Linux) is usrmerged; - a custom variable
TOOLSis initialized to point to the subdirectorymytoolchain/tools. This is where the compiled cross-toolchain will be placed. Itsbinsubdirectory is also added to thePATH.
Grab the sources
To build a complete toolchain, we need the following:
- the GNU binutils, which comprise the assembler (
as), the link editor (ld) and a bunch of useful extras; - the GNU Compiler Collection (GCC), providing C and C++ compilers, as well as an implementation of the C++ standard library;
- a C standard library. Unlike the C++ library, this is not bundled with GCC and we get to choose one among a number of choices (glibc, musl, …). To keep things simple, we’ll be using the GNU C Library, glibc, although it will not result in the smallest programs for our target system. Other C libraries can help producing smaller final executables, but such level of optimization is beyond the scope of this article.
- the Linux kernel headers, since glibc depends on them when built to run on a Linux system.
The following snippet downloads the versions that I tested to
successfully build and place them under sources, giving each archive
its own folder:
mkdir -p "$CROSSDIR/mytoolchain/sources"
cd "$CROSSDIR/mytoolchain/sources"
download_sources() {
local dirs=(binutils gcc glibc linux)
local urls=(
'https://mirror.easyname.at/gnu/binutils/binutils-2.37.tar.xz'
'https://ftp.nluug.nl/languages/gcc/releases/gcc-11.2.0/gcc-11.2.0.tar.xz'
'https://ftp.gnu.org/gnu/glibc/glibc-2.34.tar.xz'
'https://cdn.kernel.org/pub/linux/kernel/v5.x/linux-5.15.7.tar.xz'
)
for (( i=0; i < ${#dirs[@]}; i++ )) {
mkdir -p "${dirs[i]}"
( cd "${dirs[i]}" && curl -LO "${urls[i]}" )
}
}
download_sources
We should end up with a file tree like this:
/home/manu/projects/embedded/mytoolchain/sources
|-- binutils
| `-- binutils-2.37.tar.xz
|-- gcc
| `-- gcc-11.2.0.tar.xz
|-- glibc
| `-- glibc-2.34.tar.xz
`-- linux
`-- linux-5.15.7.tar.xz
Understand the build order
The sources being available, all pieces must be built in the correct order. Ideally, there should be a linear build order so that each item is compiled only once.
This looks simple in theory:
- first, the cross-binutils. These tools will handle the binary format of the target (ARM), but will otherwise run and use libraries from the host (x86-64). Only a native x86-64 compiler is required to build them, so we can do this right away with our local system compiler;
- Linux kernel headers do not need to be built at all, they are simply copied somewhere the cross-compiler will find them, so again we can do this step right away;
- at this point we could build the cross-GCC: again, ideally this package emits code for the target but only depends on libraries and headers from the host;
- use the cross-GCC to build glibc for the target.
Unfortunately, this is not possible.
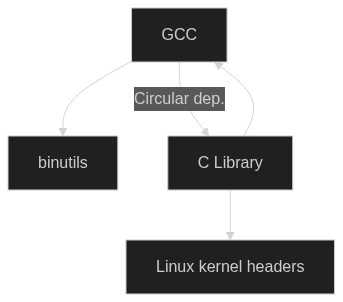
As explained by LFS and crosstool-ng,
there is a circular dependency between GCC and glibc: glibc is a target
library, so it must be compiled with a cross compiler for the target
system and obviously depends on cross-GCC. However, some components
of GCC (such as libgcc and libstdc++) depend on the C library of the
target. This creates a dependency loop: we need a cross-GCC to build
glibc, but without a built glibc we cannot build a cross-GCC. This
situation is depicted in the following picture:
How do we escape this? Thankfully, by passing certain options to the GCC
build system, it is possible to eliminate the reliance on the target
glibc, and thus build GCC before glibc. The price we pay for this is
that the compiler produced this way is not complete: it cannot be used
to build hosted C or C++ code (since GCC’s C++ standard library depends
on the target C library, and regular C apps expect a working C library
as well) and libgcc, an internal component of GCC which is linked to
pretty anything GCC builds and provides some low-level services, lacks
certain features. This reduced compiler, called the bootstrap
compiler, can however be used to build C code that does not depend on
the missing features and that does not require a C library in place.
Fortunately, glibc fits this scenario.
Therefore, we can break free by first building a bootstrap compiler, using it to compile glibc, then recompiling GCC again, this time by telling it that a target C library is available, thus building the full thing. This second GCC build is called the final compiler, and is what will become part of our toolchain. The bootstrap compiler will be thrown away as soon as the final compiler is ready. Here the dependency graph, updated:

Building glibc with the bootstrap compiler does not impact its level of completeness or optimization. From LFS, Toolchain Technical Notes:
Now, there is more about cross-compiling: the C language is not just a compiler, but also defines a standard library. In this book, the GNU C library, named glibc, is used. This library must be compiled for the lfs machine, that is, using the cross compiler cc1. But the compiler itself uses an internal library implementing complex instructions not available in the assembler instruction set. This internal library is named libgcc, and must be linked to the glibc library to be fully functional! Furthermore, the standard library for C++ (libstdc++) also needs being linked to glibc. The solution to this chicken and egg problem is to first build a degraded cc1 based libgcc, lacking some functionalities such as threads and exception handling, then build glibc using this degraded compiler (glibc itself is not degraded), then build libstdc++. But this last library will lack the same functionalities as libgcc.
Our final build order therefore is:
- binutils;
- bootstrap GCC;
- Linux kernel headers;
- glibc;
- final GCC.
Build the binutils
Let’s start with the first package.
cd $CROSSDIR/mytoolchain/sources/binutils
tar -xf binutils-2.37.tar.xz
mkdir -p build
cd build
../binutils-2.37/configure --prefix='' --enable-initfini-array \
--with-sysroot='${exec_prefix}/sysroot' --target="$TARGET_TRIPLET"
First, we extract the sources and then create a build directory where
the build system will create the binaries. Often, when building from a
tarball, we can run the configure script directly from the sources
folder, doing what is called an in-tree build, with object files being
placed alongside the sources. The GNU build system also supports
out-of-tree builds, where basically we execute configure && make from
a different folder than the one holding the sources. However, depending
on the package, doing an out-of-tree build can be either recommended or
mandatory, and notably GCC falls in this category. As GCC docs say:
First, we highly recommend that GCC be built into a separate directory from the sources which does not reside within the source tree. This is how we generally build GCC; building where srcdir == objdir should still work, but doesn’t get extensive testing; building where objdir is a subdirectory of srcdir is unsupported.
Since there should be no negative effects in doing an out-of-tree build
even when there is no explicit requirement to do so, I opted to build
every package this way. The build folder is a sibling of the sources
folder.
Now, let’s break down the configure options and the reasons behind them.
--prefix='' determines the usual installation prefix that all
autotools-based builds expect. It serves two main purposes:
- it defines the path under which
make installwill place the newly built files (although we can add a prefix to that path using theDESTDIRvariable); - it can be hardcoded into applications so that they know where to look for related components.
The second point can be problematic because it means that, once built, an app will expect to be installed under a specific path and therefore it cannot be moved elsewhere on the filesystem, because it will still look for its bits and pieces under the original path.
Thankfully, binutils (but also GCC) developers have gone through lengths to ensure that we can build relocatable toolchains. A program is relocatable if it does not depend on its installation prefix, but instead locate its parts by obtaining the absolute path to its own executable and them moving from there using relative paths.
ld uses the following technique (implemented in
binutils-2.37/libiberty/make-relative-prefix.c):
- it takes the name of the executable as passed to the command
invocation (its
argv[0]); - if it’s just a program name (i.e.
ld), it looks for it in thePATHto get the full path; - if it’s a relative path, it resolves it to the full path using the current working directory;
- otherwise it’s used verbatim;
- resolve links to get the pathname of the real executable. This is essential to reach the real place where the app is placed, even if the program is called through a link.
If an applications is relocatable, the prefix is not that important
anymore. However, when running make install DESTDIR="$DESTDIR", it is
still used to compute paths, so that things gets installed under
$DESTDIR/$PREFIX An empty prefix (‘’) (which I copied from the configuration
switches used for the official ARM toolchain) means
that no prefix at all is used and files would be placed under $DESTDIR/bin,
$DESTDIR/lib and so on.
Now, to with-sysroot. A sysroot is a prefix under which a toolchain
program (ld in this case, but it also applies to gcc) expects to be
able to find include files and libraries for the target, in our case,
for ARM. This is where we will install things, like the C library,
which pertain to the target.
For the linker to know where the sysroot is, we have two options:
- we can pass the
--sysroot="/path/to/sysroot"option to everyldinvocation. This must also include any calls made toldby other tools higher in the toolchain and is easy to forget about; - we can specify the default sysroot at build time and have
ldremember it. It can always be overridden on a per-call basis using--sysroot, but at least the default behavior will be sane even without it. This is what--with-sysrootdoes.
Forgetting to pass --with-sysroot when building and also forgetting
to use --sysroot when calling the cross-linker will cause it to search
for target libraries under default paths on the host, like /usr/lib/.
This is not what we want as libraries there are compiled for the host
architecture.
We can pass --with-sysroot any path, but the binutils support a
special case that is essential to make the toolchain relocatable: if the
sysroot is located under the exec-prefix for the build (which defaults
to prefixif not overridden), ld will automatically compute its path
using the executable path. This means that effectively the sysroot moves
along with the rest of the toolchain. Without this behaviour, we would
end up with a toolchain that is not actually relocatable, because it
would search for libraries under a fixed sysroot path.
The build system accepts various forms for the sysroot path for it to be
considered under the exec-prefix and thus relocatable, which can be
found by looking at binutils-2.37/ld/configure (an excerpt follows):
# Check whether --with-sysroot was given.
if test "${with_sysroot+set}" = set; then :
withval=$with_sysroot;
case ${with_sysroot} in
yes) TARGET_SYSTEM_ROOT='${exec_prefix}/${target_alias}/sys-root' ;;
*) TARGET_SYSTEM_ROOT=$with_sysroot ;;
esac
TARGET_SYSTEM_ROOT_DEFINE='-DTARGET_SYSTEM_ROOT=\"$(TARGET_SYSTEM_ROOT)\"'
use_sysroot=yes
if test "x$prefix" = xNONE; then
test_prefix=/usr/local
else
test_prefix=$prefix
fi
if test "x$exec_prefix" = xNONE; then
test_exec_prefix=$test_prefix
else
test_exec_prefix=$exec_prefix
fi
case ${TARGET_SYSTEM_ROOT} in
# <====== These are the interesting lines
"${test_prefix}"|"${test_prefix}/"*|\
"${test_exec_prefix}"|"${test_exec_prefix}/"*|\
'${prefix}'|'${prefix}/'*|\
'${exec_prefix}'|'${exec_prefix}/'*)
# <====== End
t="$TARGET_SYSTEM_ROOT_DEFINE -DTARGET_SYSTEM_ROOT_RELOCATABLE"
TARGET_SYSTEM_ROOT_DEFINE="$t"
;;
esac
else
use_sysroot=no
TARGET_SYSTEM_ROOT=
TARGET_SYSTEM_ROOT_DEFINE='-DTARGET_SYSTEM_ROOT=\"\"'
fi
I chose to use the form that starts with the literal ${exec_prefix}.
The sysroot will be placed under the sysroot folder under the
exec-prefix and thus will be relocated with the rest of the tools.
--target="$TARGET_TRIPLET" is simple: it specifies the machine
triplet that defines the target system. We have specified it in an
environment variable in our activate.bash file while setting up the
environment. LFS explains triplets, as well as this OSDev
page. Please note that “triplets” can actually have
four fields, like in our case.
Finally, --enable-initfini-array tells the binutils to enable support
for a feature of the target system binary file format
(ELF) that cannot be detected automatically when
cross-compiling.
Now it’s time tun run make:
make -j`nproc`
After many lines of output you should be back to the terminal, hopefully
without errors. Double check that the sysroot was detected as
relocatable by checking the contents of ld/Makefile:
grep TARGET_SYSTEM_ROOT_RELOCATABLE ld/Makefile | head -n1
# You should see something like:
# TARGET_SYSTEM_ROOT_DEFINE = -DTARGET_SYSTEM_ROOT=\"$(TARGET_SYSTEM_ROOT)\" -DTARGET_SYSTEM_ROOT_RELOCATABLE
If there’s no output, check the call to configure. As things are, the
sysroot will not move together with the rest of the toolchain.
If everything is fine, let’s install binutils:
make install DESTDIR="$TOOLS"
Build the bootstrap compiler
Now it’s time to build the bootstrap compiler.
GCC requires some additional libraries, which are listed in its prerequisites page. We will use the versions that ship with Arch Linux, as they are recent enough.
sudo pacman -S --noconfirm --needed libmpc mpfr gmp
(
cd /tmp
curl -L https://aur.archlinux.org/cgit/aur.git/snapshot/isl.tar.gz | tar -xzf -
cd isl
makepkg -si
)
Unpack and configure GCC:
cd $CROSSDIR/mytoolchain/sources/gcc
tar -xf gcc-11.2.0.tar.xz
mv gcc-11.2.0{,-bootstrap}
mkdir -p build-bootstrap
cd build-bootstrap
../gcc-11.2.0-bootstrap/configure \
--prefix='' \
--with-sysroot='${exec_prefix}/sysroot' \
--target="$TARGET_TRIPLET" \
--enable-initfini-array \
--enable-languages=c \
--without-headers \
--with-newlib \
--disable-gcov \
--disable-threads \
--disable-shared \
--disable-libada \
--disable-libssp \
--disable-libquadmath \
--disable-libgomp \
--disable-libatomic \
--disable-libstdcxx \
--disable-libvtv
--prefix and --with-sysroot have the same meanings and implications
as for binutils, so we won’t repeat them here. It’s important to use the
same values used for binutils, otherwise the two sets of tools will have
different ideas about were to install things when make install is
called and will look for libraries in different places. --target and
--enable-initfini-array also work the same as before.
--enable-languages is new and tells GCC which languages should be
supported. Remember that GCC means “GNU Compiler Collection”, because it
supports more than just C and C++. However, the bootstrap compiler will
only ever be used to build glibc, which is written in C, so there’s no
reason to enable more languages for now.
--without-headers and --with-newlib are the two options that make
the magic of disabling GCC’s reliance on a preexisting target C library.
If we look inside gcc-11.2.0/gcc/configure:
# If this is a cross-compiler that does not
# have its own set of headers then define
# inhibit_libc
# If this is using newlib, without having the headers available now,
# then define inhibit_libc in LIBGCC2_CFLAGS.
# This prevents libgcc2 from containing any code which requires libc
# support.
: ${inhibit_libc=false}
if { { test x$host != x$target && test "x$with_sysroot" = x ; } ||
test x$with_newlib = xyes ; } &&
{ test "x$with_headers" = xno || test ! -f "$target_header_dir/stdio.h"; } ; then
inhibit_libc=true
fi
Note that we are not going to use the newlib C library: we’ll stick to glibc. But the option is still required to eliminate dependencies on the (yet to be built) C library.
Finally, the various --disable-* options turn off features we don’t
want (or can’t) build yet.
Now start the build:
make -j`nproc` all-gcc all-target-libgcc
all-gcc and all-target-libgcc are Makefile targets. They need to be
specified so that only the parts of GCC we actually need are built,
cutting the build time.
This time, we will not install the compiler under $TOOLS, but in a
separate bootstrap directory. Since this is going to be thrown away as
soon as the final compiler is build, we don’t want to risk polluting the
final location with leftovers.
However, under bootstrap there is no sysroot folder: creating
a symlink to the one under tools gives the bootstrap compiler the
same view of the sysroot as the binutils. At the same time, we want to
create sysroot under $TOOLS, since we haven’t done it already and no
files has been placed there by a make install. Finally, we also need
to create a link $TARGET_TRIPLET under bootstrap, pointing to
the folder where the binutils are installed. This is
required by GCC to properly locate the assembler and the
linker:
If you are not building GNU binutils in the same source tree as GCC, you will need a cross-assembler and cross-linker installed before configuring GCC. Put them in the directory prefix/target/bin.
mkdir -p "$SYSROOT"
mkdir -p "$TOOLS/../bootstrap"
ln -sf "$SYSROOT" "$TOOLS/../bootstrap/sysroot"
ln -sf "$TOOLS/$TARGET_TRIPLET" "$TOOLS/../bootstrap/$TARGET_TRIPLET"
Now install the files:
make install-gcc install-target-libgcc DESTDIR="$TOOLS/../bootstrap"
Confirm that the bootstrap compiler recognizes the sysroot:
$TOOLS/../bootstrap/bin/arm-none-linux-gnueabihf-gcc -print-sysroot
# It should output something like:
# /home/manu/projects/embedded/mytoolchain/bootstrap/bin/../sysroot
Now we are ready to move to building glibc. But before that, we need to extract the kernel headers.
Extract the kernel headers
First we need to ensure we have rsync installed, as it is used by the build system to copy things:
sudo pacman -S --noconfirm --needed rsync
Then proceed:
cd $CROSSDIR/mytoolchain/sources/linux
tar -xf linux-5.15.7.tar.xz
cd linux-5.15.7
make mrproper
make headers_install INSTALL_HDR_PATH="$SYSROOT/usr"
This step is simpler that the others: there is not build
directory because with Linux we do things in-tree.
make mrproper ensures that the kernel tree is clean, without leftover
files from previous builds. Technically, we have just unpacked it so
there should be nothing to clean, but LFS recommends this step just in
case something has slipped through the packaging.
make headers_install INSTALL_HDR_PATH="$SYSROOT/usr" places the
headers under $SYSROOT/usr/include (the include is added
automatically). The kernel headers are the first thing placed under the
sysroot, as they belong to the target system, and according to the
Filesystem Hierarchy Standard, system include files should go
under /usr/include.
The commands above don’t show an important element: in order to
extract headers for the appropriate target architecture, the kernel
build system looks for an ARCH variable. We didn’t explicitly pass
one, however, because it is already defined in our environment via
activate.bash. ARCH is a convention used by many tools (the kernel,
U-Boot, BusyBox among others) and by placing it in the environment we
can’t forget it.
Build glibc
Ensure your python is up to date, as glibc’s build systems checks for this:
sudo pacman -S --needed --noconfirm python
Unpack and configure:
cd $CROSSDIR/mytoolchain/sources/glibc
tar -xf glibc-2.34.tar.xz
mkdir -p build
cd build
(
PATH="$TOOLS/../bootstrap/bin:$PATH"
# Configure
../glibc-2.34/configure \
--prefix=/usr \
--host="$TARGET_TRIPLET" \
--build="$HOST_TRIPLET" \
--with-headers="$SYSROOT/usr/include" \
--enable-kernel=3.2
# Build
make -j`nproc` CXX=''
# Install
make install DESTDIR="$SYSROOT" CXX=''
)
First, note that we are injecting a modified PATH into the
environment. This is required to find the bootstrap compiler, since the
bootstrap/bin folder is not in our default PATH.
Unlike previous components, glibc’s prefix is /usr. Again, glibc is a
target library, so its expected installation path is under the
root filesystem of the target system, which is what it will see at
runtime.
--host and --build control the actual cross-compilation. There is no
--target, because glibc does not emit code for a platform, it runs
on a platform, the host, which needs to be set to the triplet of the
target ARM system. --build, conversely, specifies the system used for
the build, which is our current x86-64 machine.
--with-headers merely specifies where the kernel headers are to be
found. --enable-kernel defines the lowest Linux kernel version that
this C library will support. The higher the version, the faster and
smaller the code becomes, because it does not need to cater to older
kernels and can drop compatibility stuff. But it also means that if you
ever try to run an application linked against this glibc on a system
whose running kernel is lower than --enable-kernel, all you get is an
abort. The value 3.2 is the lowest version still supported by glibc
2.34, which means we are compiling for the widest range of kernels, at
the expense of the largest compatibility bloat.
When doing make and make install, there’s an extra CXX=''
variable. If you skim through the output of configure, you’ll notice a
warning message saying that the cross-g++ was found without a target
prefix. What is actually happening is that, since with didn’t enable C++
for the bootstrap compiler, there is no g++ under bootstrap, and the
build system ends up finding the g++ that is installed on the host,
typically at /usr/bin/g++. Of course, this compiler cannot handle ARM
code. So when actually calling make we override this selection with an
empty value, causing some Makefile code to behave as if no C++ compiler
is installed. This is required to avoid the build phase trying to
compile a C++ file, ./glibc-2.34/support/links-dso-program.cc,
which also has a C equivalent
./glibc-2.34/support/links-dso-program-c.c that will be used instead.
With glibc installed, the last step is to build the final GCC. Before that, however, we can get rid of the bootstrap compiler, as its work is over:
rm -rf "$TOOLS/../bootstrap"
Build the final GCC
cd $CROSSDIR/mytoolchain/sources/gcc
tar -xf gcc-11.2.0.tar.xz
mv gcc-11.2.0{,-final}
mkdir -p build-final
cd build-final
../gcc-11.2.0-final/configure \
--prefix='' \
--target="$TARGET_TRIPLET" \
--with-sysroot='${exec_prefix}/sysroot' \
--with-build-sysroot="$SYSROOT" \
--enable-languages=c,c++ \
--enable-initfini-array
Most options should be familiar by now. This time we also enable C++
support and the --disable-* options are gone as we want to build the
full thing. The only new stuff is --with-build-sysroot, which points
to the full path of our sysroot. As per the docs, a build sysroot works
just like a sysroot, but it is only used while building GCC itself, it
is not remembered by the final cross-compiler. The reason we need this
is allowing the build system to properly find include files and
libraries under the sysroot even if the value of --with-sysroot does
not make sense during the build. Without this option, the build will
fail with errors claiming that header files cannot be found under
/sysroot/usr/include. GCC is smart enough to compute the absolute path
to the sysroot using its own executable path, but the build system is
not.
Now build and install:
make -j`nproc`
make install DESTDIR="$TOOLS"
Congrats! This was the last step. Now let’s try out the cross compiler.
Test the cross-toolchain
To test the cross toolchain, we’ll build a totally nonsensical C++ app that calls both some C and C++ functions and uses exceptions to simply print a string, basically to exert C, C++ features and stack unwinding. Then we’ll use qemu to see if it runs.
Install qemu for ARM:
sudo pacman -S --needed --noconfirm qemu-arch-extra
Place the following code into a test.cc file:
#include <stdio.h>
#include <unistd.h>
#include <sys/utsname.h>
#include <iostream>
#include <stdexcept>
// A couple of functions
void func1() {
throw std::runtime_error("Hello crossworld");
}
void func() {
try {
func1();
} catch (...) {
printf("%s\n", "Hello crossworld from C");
throw;
}
}
int main() {
for (size_t i {0}; i < 5; i++) {
try {
func();
} catch (const std::runtime_error &e) {
std::cout << e.what() << " from C++ too!" << std::endl;
}
sleep(1);
}
struct utsname un;
if (!uname(&un)) {
std::cout << "This little show was hosted by " << un.machine << std::endl;
}
return 0;
}
Build the code and run it:
# Dynamically linked build
arm-none-linux-gnueabihf-g++ -o test test.cc
qemu-arm -L "$SYSROOT" -E LD_LIBRARY_PATH="$TOOLS/$TARGET_TRIPLET/lib" ./test
# You should see:
#
# Hello crossworld from C
# Hello crossworld from C++ too!
# Hello crossworld from C
# Hello crossworld from C++ too!
# Hello crossworld from C
# Hello crossworld from C++ too!
# Hello crossworld from C
# Hello crossworld from C++ too!
# Hello crossworld from C
# Hello crossworld from C++ too!
# This little show was hosted by armv7l
# Same code, static build
arm-none-linux-gnueabihf-g++ -static -o test test.cc
qemu-arm ./test
# Same output as above
-L tells qemu where to find the dynamic linker for the ARM platform,
while -E adds an LD_LIBRARY_PATH to the environment of our new
process, which the dynamic linker can use to locate the standard C++
library (without that you’d get an error about loading libstdc++.so.6).
Such switches are not needed for the static build.